
Projects
Secure and Safe Assured Autonomy for Urban Air Mobility
National Aeronautics and Space Administration (NASA)
Research Periods: Aug 2021 – Aug 2025
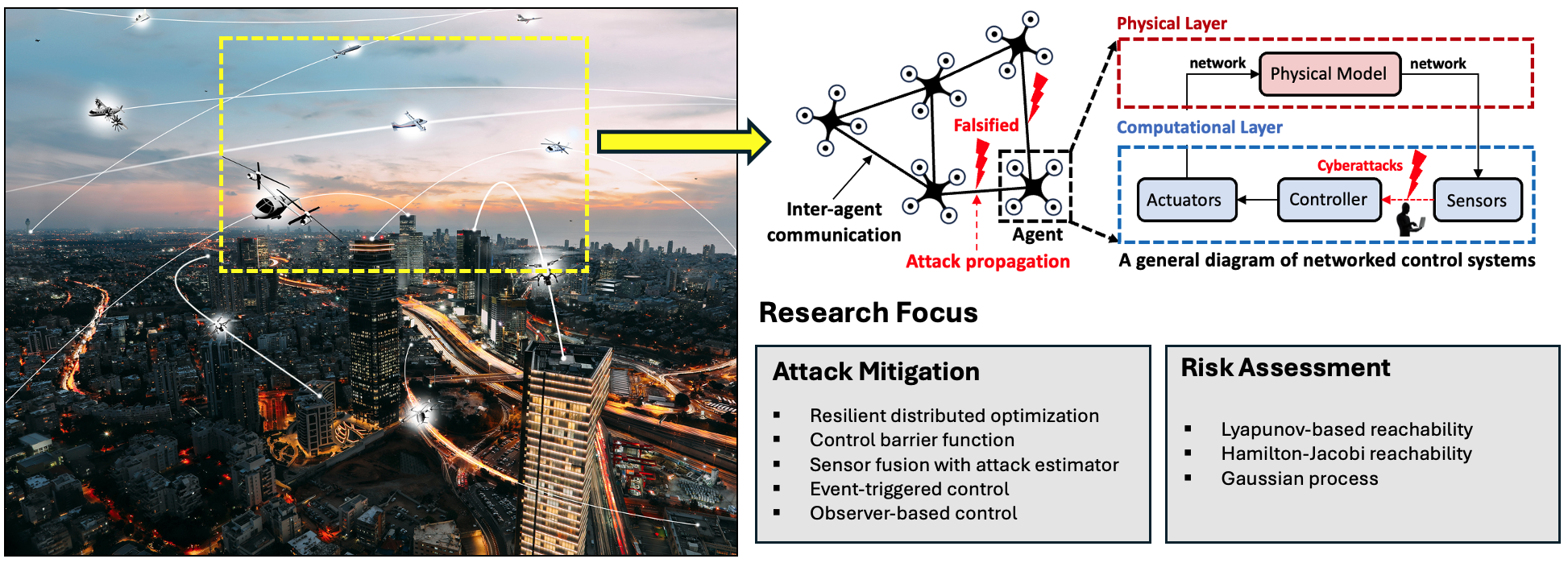
Our objective is to develop a vehicle-level advanced control algorithm for urban air mobility (UAM) applications. This allows UAM aerial vehicles (AVs) to achieve more safe and secure operations even though AVs are exposed to adversarial environments, including disturbances, systematic uncertainties, and cyberattacks. I am particularly focusing on developing cyber threat management algorithms, such as attack mitigation and risk assessment for multiple AVs. My work is based on control-theoretical approaches (e.g., Kalman filter, control barrier function, and Lyapunov stability criterion) to fully guarantee AVs' safety and security.
Development of Advanced Air Mobility Battery Management System
Ministry of Trade, Industry and Energy of the Republic of Korea
Research Periods: Oct 2024 – Dec 2026
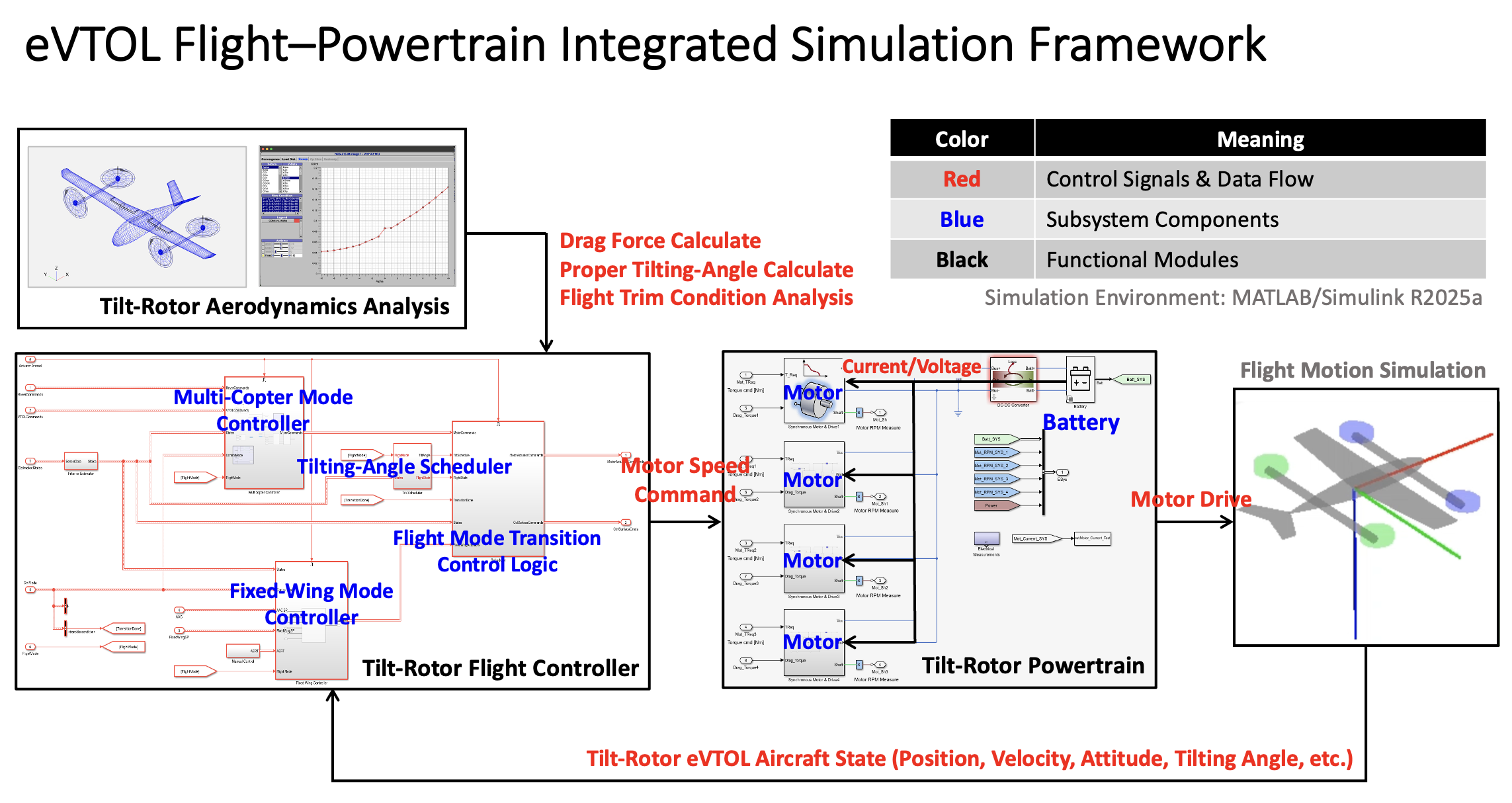
I’m currently working on the design and analysis of tilt-rotor eVTOL aircraft, focusing on how to achieve safe and efficient flight throughout all phases—from vertical takeoff to forward cruise and back to hover. My research combines aerodynamic modeling, power system simulation, and control algorithm design to better understand energy consumption and stability during complex mode transitions. By integrating trim analysis, robust control, and battery-aware estimation techniques, I aim to develop intelligent systems that ensure smooth and reliable flight under real-world conditions. Through this work, I aspire to contribute to the development of sustainable and resilient UAM in the near future.
Design and Implementation of Eco-Adaptive Cruise Control for Class 8 Semi-Trucks
Cummins Inc., Cummins Technical Center
Research Periods: May 2025 – Aug 2025
As a PhD Research Intern at Cummins’ Connected and Intelligent Systems group, I led the design and implementation of real-time predictive control algorithms aimed at improving both safety and energy efficiency for Class 8 semi-trucks. My work centered on the development of an Eco-Adaptive Cruise Control (Eco-ACC) system powered by Cummins Power Systems, where I applied a model predictive control (MPC) framework to optimize vehicle performance. By incorporating predictive strategies that account for road grade and interactions with preceding vehicles, I demonstrated up to 5–7% improvement in fuel economy while ensuring compliance with safety margin under diverse driving conditions.
